
May 26, 2023
December 26, 2018
Getting started with Microsoft Visual Studio
- Buka Aplikasi Microsoft Visual Studio

- Membuat Project File, klik FILE > NEW > PROJECT

- Pilih Visual C# > Windows Form

- Menyimpan Project File yang akan kita buat, Searching lokasi penyimpanan > Buat Folder baru > Mengubah nama Project File > OK

- Akan Muncul Lembar kerja seperti berikut:

- Kita membutuhkan Toolbox tapi tidak tersedia, cara utuk memunculkan tools bisa klik menu bar di sebelah kiri > klik kanan dan pilih CHOOSE ITEM (I)

- Menampilkan seluruh tools : Pilih SILVERLIGHT > tunggu hingga loading tools selesai > OK

- Cari LABEL dan drag ke lembar kerja, Kemudian klik label yang berada di lembar kerja > klik TEXT di menu properties > mengubah Text name Label dengan "NAME"

- Double klik Label Box di lembar kerja dan akan munc






October 18, 2018
Tutorial menggunakan Altera Max
Getting started with Altera Max Plus II
Software yang digunakan adalah Altera Max Plus versi 10.2:

Berikut ini langkah-langkah untuk membuat project di Altera Max Plus versi 10.2:
1. Membuka Aplikasi Software

2. Klik File>New>choose "Grafic Editor File">OK

1. Membuka Aplikasi Software

2. Klik File>New>choose "Grafic Editor File">OK

3.Klik Symbol> Insert NewSymbol> c:\maxplus2\max2lib\prim\*> OK > "Silahkan Design project kamu" Contoh rangkaian yang akan dibuat membutuhkan 1 buah Gerbang AND2, 2 buah Input dan 1 buah output. Pilih komponenmu > klik OK untuk menampilkannya di lembar kerja

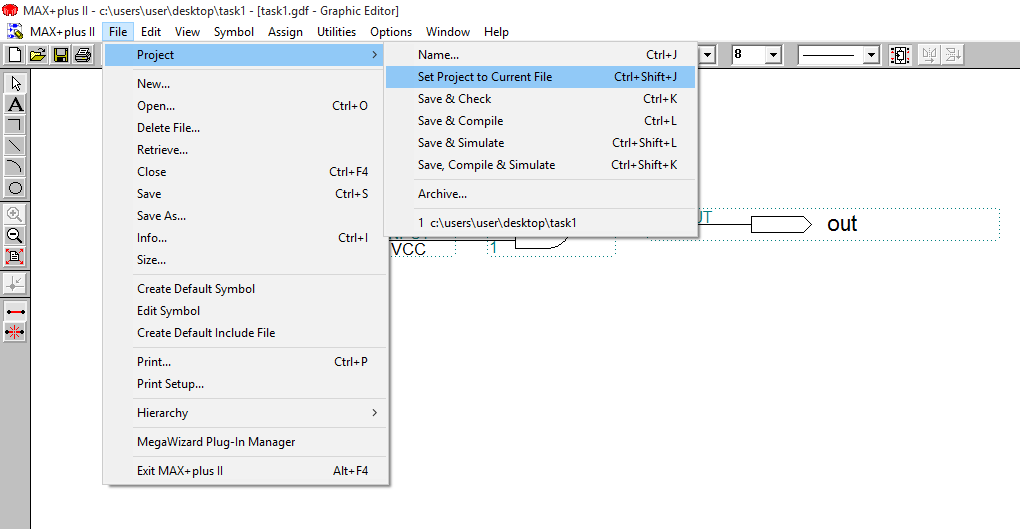
4. Berikut ini contoh Rangkaian menggunakan Gerbang AND dengan 2 Inputan, beri Line Connection masing-masing komponen menggunakan Draw a Diagonal Line tools

5. Pilih File>Project>Set Project to Curent File









6. Klik MAX plus>Wave from editor

7. Klik File>End time> fill the end time with "400"

8. Klik File>Project>Save,Compile & Simulate

9. Setelah mucul beberapa kotak dialog seperti berikut:

10. Klik Node>Enter Node from SNF

11. Klik List>Klik => to tranfer all the Nodes and Group>OK

12. Double Klik Value>memasukkan Logika pada tiap-tiap inputan (in1 dan in 2 gerbang AND) pada Default Value> OK

13. Klik Start pada kotak dialog Simulator untuk melihat Output

May 4, 2015
Jenis-jenis Robot
1. ARM ROBOT

THE END EFFECTOR atau tangan robot,
dapat dirancang untuk melakukan setiap tugas yang diinginkan seperti
pengelasan, mencengkeram, berputar dll, tergantung pada aplikasi. Sebagai
contoh lengan robot di jalur perakitan otomotif melakukan berbagai tugas
seperti pengelasan dan bagian rotasi dan penempatan selama perakitan. Dalam
beberapa keadaan, emulasi dekat tangan manusia yang diinginkan, seperti pada
robot yang dirancang untuk melakukan perlucutan senjata bom dan pembuangan.
TIPE 6 AXIS ARTICULATED ROBOT DARI
KUKA
- Robot Cartesian / Gantry robot: Digunakan untuk memilih dan tempat kerja, penerapan sealant, operasi perakitan, penanganan peralatan mesin dan las busur. Ini adalah robot yang lengan memiliki tiga sendi prismatik, yang sumbu bertepatan dengan koordinator Cartesian.
- Silinder robot: Digunakan untuk operasi perakitan, penanganan pada peralatan mesin, las titik, dan penanganan di mesin diecasting. Ini adalah robot yang sumbu membentuk silinder sistem koordinat.
- Spherical robot / robot Polar (seperti Unimate): Digunakan untuk penanganan di mesin perkakas, las titik, diecasting, mesin fettling, gas las dan las busur. Ini adalah robot yang sumbu membentuk sistem koordinat polar.
- Scara robot: Digunakan untuk memilih dan tempat kerja, penerapan sealant, operasi perakitan dan peralatan mesin penanganan. Robot ini memiliki dua sendi putar paralel untuk memberikan kepatuhan dalam pesawat.
- Artikulasi robot: Digunakan untuk operasi perakitan, diecasting, mesin fettling, gas las, busur dan lukisan semprot. Ini adalah robot yang lengan memiliki setidaknya tiga sendi putar.
- Paralel robot: Salah satu penggunaan adalah platform mobile penanganan simulator penerbangan kokpit. Ini adalah robot yang tangannya memiliki bersamaan sendi prismatik atau rotary.
- Antropomorfik robot: Serupa
dengan tangan robot Luke Skywalker menerima pada akhir The Empire Strikes
Back. Hal ini dibentuk dengan cara yang menyerupai tangan manusia, yaitu dengan
jari independen dan jempol.2. MOBILE ROBOT
MOBILE ROBOT adalah konstruksi robot yang ciri khasnya
adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan
robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari
satu titik ke titik yang lain.
A.
GROUND
ROBOT
1.1 ROBOT BERKAKI

Dalam pembuatan robot berkaki
yang menggunakan banyak motor sevo dibutuhkan suatu modul servo
controller untuk mengatur pergerakan robot, akan tetapi modul ini
sulit di dapatkan serta harganya yang cukup mahal di pasaran. Dengan keadaan
yang seperti ini sebagai alternatif kita dapat membuat sendiri modul servo
controller hanya dengan menggunakan dua buah mikrokontroller PIC 16F84
ditambah dengan sedikit komponen lainya. Pemilihan
motor servo standar 180 derajat yang menggerakan persendian kaki pada robot
secara vertikal dan horizontal adalah sangat penting untuk menentukan kombinasi
pergerakan robot,
 Robot beroda
(wheel robot) dapat dibagi menurut sistem penggerak nya, yaitu sistem berak.
Robot beroda
(wheel robot) dapat dibagi menurut sistem penggerak nya, yaitu sistem berak.
1. Differential
drive
Sistem gerak Differential drive terdiri dari dua buah roda yang berpasangan pada
kiri dan kanan robot, perhatikan gambar dibawah ini. Sistem ini memunginkan
robot berputar ditempat dengan cara memutar motor dengan arah berlawanan.
Contoh sistem ini pada kehidupan sehari-hari adalah pada gardan belakang mobil
dan mainan mobilradio control (RC).

2. Tricyle
drive

3. Syncronous
drive

4. Holonomic
drive

B. ROBOT
SUBMARINE

C. ROBOT
AERIAL/ TERBANG
 Kemajuan dalam bidang teknologi dan ilmu pengetahuan
khususnya dalam bidang teknik kendali (teknik kontrol) telah berkembang dengan
pesat.
Kemajuan dalam bidang teknologi dan ilmu pengetahuan
khususnya dalam bidang teknik kendali (teknik kontrol) telah berkembang dengan
pesat.Perkembangan ini mempermudah komunikasi dan pengendalian alat elektronik khususnya pengontrolan robot terbang (Flying Robot). Seiring perkembangannya, saat ini telah berkembang sistem kendali robot terbang jarak jauh dengan menggunakan frekuensi radio sehingga tidak perlu memakai saluran kabel yang banyak. Pembuatan robot terbang ini bertujuan untuk merancang suatu model robot terbang yang dapat diaplikasikan sebagai media transportasi pendistribusian bantuan bencana alam. Aplikasi dari robot terbang ini dikhususkan pada daerah terisolir dimana media transportasi darat tidak dapat digunakan. Kendali robot terbang ini jauh ini sangat diperlukan untuk membuat sebuah sebuah sistem/instrumen yang dapat digunakan sebagai system pengaturan posisi, kecepatan baling-baling, komunikasi datanya, serta keseimbangan dari robot terbang sendiri.
Level Switch Test and Commissioning
Melihat test and commissioning level switch (531.FB1-531.FB4) di top Feed Bin Cement Grinding Dosing PT. SEMEN BOSOWA BANYUWANGI
Continue reading Level Switch Test and Commissioning
Menurut bahasa Level artinya ketinggian sedangkan Switch artinya saklar, jadi secara keseluruhan Level Switch merupakan saklar otomatis yang digunakan untuk mendeteksi ketinggian. Level Switch ini digunakan untuk mendeteksi suatu volume yang terdapat pada tabung atau tangki penampungan. Sensor dari Level switch berupa besi panjang (sepanjang tempat penampungan/feed bin) yang berfungsi sebagai pendeteksi ketinggian material, sementara rangkaian kontrolnya berbentuk bulat yang terdapat di top feed bin. Rangkaian kontrol bagian dalam terdapat rangkaian elektronik berupa terminal yang dihubungkan ke perangkat listrik, ada 8 terminal dan 7 kabel. Namun yang dipasang hanya 4 kabel, ke-4 ini terdiri dari: kabel power positif (+) dan negatif (-), kabel pendeteksi low, kabel pendeteksi high. Level Switch mempunyai tegangan kerja antara 100-200 Vac dan mempunyai beban kerja sekitar 5 Ampere.
Di PT. Semen Bosowa Banyuwangi terdapat tempat penampungan material atau biasa disebut dengan Feed Bin berbentuk tabung, sehingga memungkinkan untuk menggunakan Level Switch sebagai pendeteksi ketinggian material yang ditampung. Di area 531 (Cement Grinding Dosing) terdapat 4 buah feed bin yang masing-masing menampung material yang berbeda. Test dan commissioning level switch yang berada pada top Feed Bin dilakukan agar level switch dapat mendeteksi dengan baik sehingga dapat mengirimkan sinyal ke CCR.
Prinsip kerja level switch, pada saat material pada feed bin telah mencapai level tertentu (high) dan terdeteksi oleh sensor, maka sensor level switch akan mengirimkan sinyal ke CCR berupa alarm yang mengindikasikan bahwa Feed Bin telah penuh, demikian pula sebaliknya pada saat level switch mencapai posisi low dan terdeteksi oleh sensor, maka sensor akan mengirimkan sinyal ke CCR sehingga CCR akan mengisi Feed Bin dengan material.




Feed Bin di area 531 (Cement Grinding Dosing)

Tampak pemasangan 4 kabel pada terminal level switch

Test and Commissioning Level switch di top feed bin
February 1, 2015
GERBANG LOGIKA AND, OR, NOT, XOR, NAND, NOR, XNOR;
PIRANTI LOGIKA AND, OR, NOT, XOR, NAND, NOR, XNOR;
1. TUJUAN
Setelah melaksanakan percobaan ini, praktikan diharapkan
dapat:
Menuliskan hubungan antara input dan output pada piranti logika AND, OR, NOT, XOR, NAND, NOR, XNOR;
Menggunakan table kebenaran untuk menyatakan hubungan antar
piranti logika.
2. DASAR TEORI
Gerbang (gate) dalam
rangkaian logika merupakan fungsi yang menggambarkan hubungan antara masukan
dan keluaran. Untuk menyatakan gerbang-gerbang tersebut biasanya digunakan
simbol-simbol tertentu. Ada beberapa standar penggambaran simbol. Salah satu
standar simbol yang populer adalah MIL-STD-806B yang dikeluarkan oleh
Departemen Pertahanan Amerika Serikat untuk keperluan umum pada bulan Februari
1962.Untuk menunjukkan prinsip kerja tiap gerbang seperti: AND, OR, NOT, NAND, NOR,
XOR, dan XNOR dapat digunakan beberapa cara.
Cara yang umum dipakai antara lain adalah tabel kebenaran (truth table) dan
diagram waktu (timing diagram). Karena merupakan rangkaian digital, tentu saja
level kondisi yang ada dalam tabel atau diagram waktu hanya dua macam, yaitu
logika 0 (low, atau false) dan logika 1 (atau high, atau true).
Logika 0 (rendah) mempunyai tingkat tegangan yang rendah.
Untuk TTL tegangan ini berkisar 0-0,5 Volt. Logika 1 (tinggi) menggunakan
tingkat tegangan yang paling tinggi. Untuk TTL tegangan ini berkisar 2,4-5
Volt.
3. ALAT DAN KOMPONEN
3. ALAT DAN KOMPONEN
Adapun komponen-komponen dan alat yang digunakan untuk
melakukan percobaan ini adalah sebagai berikut:
1.
Modul AND- PTE-006-01;
2.
Modul NAND- PTE-006-02;
3.
Modul OR- PTE-006-03;
4.
Modul NOR- PTE-006-04;
5.
Modul XNOR- PTE-006-06;
6.
Modul AND- PTE-006-09;
7.
Modul NAND- PTE-006-07;
8.
Power Supply (Catu Daya)- PTE-006-27;
9.
Rangka Panel;
10. Kabel Penghubung.
4. PROSEDUR KERJA
Berikut ini merupakan langkah-langkah untuk melakukan
percobaan ini:
1. Membuat rangkaian gerbang AND, NAND, OR, NOR, XNOR, dan XOR
pada rangka panel dengan menggunakan panel sesuai dengan gerbangnya
masing-masing yang terdiri dari 2 masukan;
2. Menguji gerbang yang telah dirangkai dengan memberi
masukan-masukan A dan B logika 0 atau 1 sesuai dengan table kebenaran berikut
ini:
Contoh Tabel
kebenaran 1.1 yang terdiri dari 2 masukan
A
|
B
|
F
|
0
|
0
|
|
0
|
1
|
|
1
|
0
|
|
1
|
1
|
3. Mencatat logika keluaran F yang teramati sesuai dengan
penunjukan LED pada table kebenarannya masing-masing seperti contoh table
kebenaran 1.1;
4. Membuat rangkaian AND dan NAND pada rangka panel dengan
menggunakan panel yang sesuai dengan gerbangnya masing-masing yang terdiri dari
4 masukan;
5. Menguji gerbang yang telah dirangkai dengan member
masukan-masukan A, B, C, dan D logika 0 atau 1 sesuai dengan contoh table
kebenaran 1.2 berikut ini:
Contoh Tabel Kebenaran 1.2 yang terdiri
dari 4 inputan
A
|
B
|
C
|
D
|
F
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
1
|
|
0
|
0
|
1
|
0
|
|
0
|
0
|
1
|
1
|
|
0
|
1
|
0
|
0
|
|
0
|
1
|
0
|
1
|
|
0
|
1
|
1
|
0
|
|
0
|
1
|
1
|
1
|
|
1
|
0
|
0
|
0
|
|
1
|
0
|
0
|
1
|
|
1
|
0
|
1
|
0
|
|
1
|
0
|
1
|
1
|
|
1
|
1
|
0
|
0
|
|
1
|
1
|
0
|
1
|
|
1
|
1
|
1
|
0
|
|
1
|
1
|
1
|
1
|
6. Mencatat logika keluaaran F yang teramati sesuai dengan
penunjukan LED pada tabel kebenarannya masing-masing seperti pada table
kebenaran 1.2.
5. HASIL PERCOBAAN
Dibawah ini merupakan gerbang AND beserta tabel kebenarannya
sesuai dengan penunjukan LED pada rangka panel untuk yang terdiri dari 2
inputan:

A
|
B
|
F
|
0
|
0
|
0
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
1
|
1
|
Dibawah ini merupakan gerbang NAND beserta tabel kebenarannya sesuai dengan penunjukan LED pada rangka panel yang terdiri dari 2 inputan:

A
|
B
|
F
|
0
|
0
|
1
|
0
|
1
|
1
|
1
|
0
|
1
|
1
|
1
|
0
|

A
|
B
|
F
|
0
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
1
|
1
|
1
|
1
|
Dibawah ini merupakan gerbang NOR beserta tabel kebenarannya sesuai dengan penunjukan LED pada rangka panel yang terdiri dari 2 inputan:

A
|
B
|
F
|
0
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
1
|
0
|
Table kebenaran 1.7
Dibawah ini merupakan gerbang XNOR beserta tabel kebenarannya sesuai dengan penunjukan LED pada rangka panel yang terdiri dari 2 inputan:

A
|
B
|
F
|
0
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
0
|
1
|
1
|
1
|
Dibawah ini merupakan gerbang AND beserta tabel kebenarannya sesuai dengan penunjukan LED
pada rangka panel yang terdiri dari 4 inputan:

A
|
B
|
C
|
D
|
F
|
0
|
0
|
0
|
0
|
|
0
|
0
|
0
|
1
|
|
0
|
0
|
1
|
0
|
|
0
|
0
|
1
|
1
|
|
0
|
1
|
0
|
0
|
|
0
|
1
|
0
|
1
|
|
0
|
1
|
1
|
0
|
|
0
|
1
|
1
|
1
|
|
1
|
0
|
0
|
0
|
|
1
|
0
|
0
|
1
|
|
1
|
0
|
1
|
0
|
|
1
|
0
|
1
|
1
|
|
1
|
1
|
0
|
0
|
|
1
|
1
|
0
|
1
|
|
1
|
1
|
1
|
0
|
|
1
|
1
|
1
|
1
|
Dibawah ini merupakan gerbang NAND beserta tabel kebenarannya sesuai dengan penunjukan LED pada rangka panel yang terdiri dari 4 inputan:

A
|
B
|
C
|
D
|
F
|
0
|
0
|
0
|
||
0
|
0
|
0
|
1
|
|
0
|
0
|
1
|
0
|
|
0
|
0
|
1
|
1
|
|
0
|
1
|
0
|
0
|
|
0
|
1
|
0
|
1
|
|
0
|
1
|
1
|
0
|
|
0
|
1
|
1
|
1
|
|
1
|
0
|
0
|
0
|
|
1
|
0
|
0
|
1
|
|
1
|
0
|
1
|
0
|
|
1
|
0
|
1
|
1
|
|
1
|
1
|
0
|
0
|
|
1
|
1
|
0
|
1
|
|
1
|
1
|
1
|
0
|
|
1
|
1
|
1
|
1
|
6. ANALISA HASIL PERCOBAAN
Berdasarkan tabel kebenaran 1.3 dan 1.9 yang merupakan hasil
input dan output logika 0 dan 1 menggunakan gerbang logika AND yang terdiri
dari 2 input dan 4 input menunjukkan bahwa keadaan outputnya ON jika semua
inputnya berlogika 1, selain dari keadaan ini output akan berada pada keadaan
OFF.
Tabel kebenaran 1.4 dan 1.10 yang merupakan hasil input dan
output logika 0 dan 1 menggunakan gerbang logika NAND yang terdiri dari 2 input
dan 4 input menunjukkan kebalikan dari gerbang logika AND yakni, pada saat semua
inputnya berlogika 1 maka outputnya akan berada dalam keadaan OFF dan apabila
terdapat input logika 0 maka outputnya akan berada dalam keadaan ON.
Tabel kebenaran 1.5 merupakan hasil input dan output logika 0
dan 1 menggunakan gerbang logika OR, output akan berada dalam keadaan ON jika
salah satu inputnya berlogika 1.
Tabel kebenaran 1.6 merupakan hasil input dan output logika 0
dan 1 menggunkan gerbang logika NOR menunjukkan bahwa gerbang NOR merupakan
kebalikan dari gerbang OR dimana output akan barada dalam keaadan OFF jika
salah satu inputnya berlogika 1, dan akan berada dalam keadaan ON inputnya
berlogika 0.
Table
kebenaran 1.7 merupakan hasil input dan output logika 0 dan 1 menggunkan
gerbang logika XOR yang berfungsi untuk mendeteksi keadaan-keadaan logic yang
berada diantara inputnya inputnya, jika inputnya mempunyai logika yang berbeda maka
outputnya akan berada dalam keadaan ON dan apabila inputnya berlogika sama maka
outputnya akan berada dalam keadaan OFF.
Table kebenaran 1.8 merupakan hasil input dan output logika 0
dan 1 menggunkan gerbang logika XNOR yang merupakan kebalikan dari gerbang
logika XOR, yang artinya jika input yang diberikan logika sama maka outputnya
akan berada dalam keadaan ON, sebaliknya jika input diberikan logika berberda
maka outputnya akan berada dalam keadaan OFF.
7. KESIMPULAN
Berdasarkan percobaan ini dapat kita simpulkan bahwa
masing-masing gerbang memiliki prinsip kerja yang berbeda-beda seperti:
1. Gerbang Logika AND akan berada pada kondisi ON apabila semua
inputnya berlogika 1;
2. Gerbang logika NAND merupakan kebalikan dari gerbang logika
AND akan berada pada kondisi ON apabila semua inputnya berlogika 0;
3. Gerbang Logika OR akan berada pada kondisi ON apabila salah
satu inputnya berlogika 1;
4. Gerbang logika NOR merupakan kebalikan dari gerbang logika OR
akan berada pada kondisi ON apabila semua inputnya berlogika 0;
5. Gerbang Logika XOR akan berada pada kondisi ON apabila
inputnya mempunyai logika yang berbeda;
6. Gerbang logika XNOR merupakan kebalikan dari gerbang logika
XOR akan berada pada kondisi ON apabila inputnya mempunyai logika yang sama.



{kind=link}
{kind=link}
{kind=link}